Czołg
Roboty ·Pojazd uniwersalny oparty o Raspberry Pi Zero.

Umożliwia obserwację obrazu z kamerki, odczyt napięcia na baterii (poziom rozładowania ), temperatury z Raspberry oraz wartości enkoderów. Dotychczas odczytów z enkoderów nie wykorzystałem w sposób praktyczny, jednak zamieszczenie ich umożliwi dalszy rozwój konstrukcji.
Projekt ten zaczął się od płytki PCB.
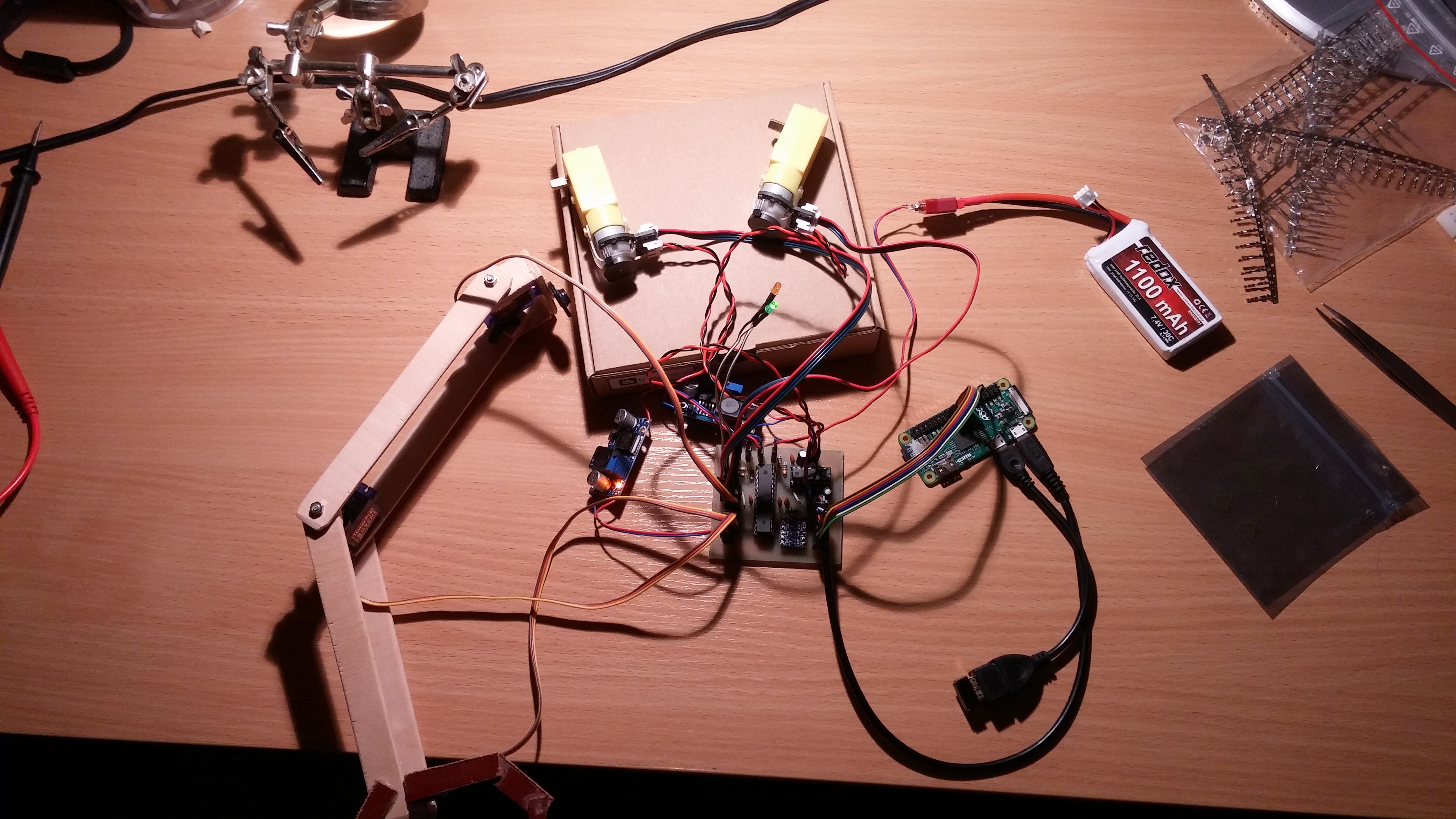
Miała być wykorzystana do sterowania robotem z następującymi elementami:
- dwa silniki z enkoderami
- trzy serwa
- komunikacja z Raspberry pooprzez SPI
- pomiar napięcia z baterii
- dwa LEDy ( uruchomienie oraz rozładowanie)

Jako źródło zasilania wykorzystałem LiPola oraz 2 przetwornicę: jedną do logigki oraz drugą do serw. W trakcie realizacji projektu jednak zorientowałem się, że ten mikrokontroler jest za słaby. Było to spowodowane tym, że potrzebowałem 3 kanałów PWM do serw oraz 2 do sterowania prędkością silników. Nie miałem jednak dostępnej takiej liczby, dlatego sygnały PWM dla serw musiałem generować programowo, przez co znacznie wzrosło obciążenie procesora. Doliczając do tego bardzo często przerwania zewnętrzne z dwóch enkoderów, nie byłem w stanie dostarczyć wystarczająco dokładnego przebiegu PWM by sterować serwami. Dlatego ostatecznie pominąłem użycie serw w tym projekcie.
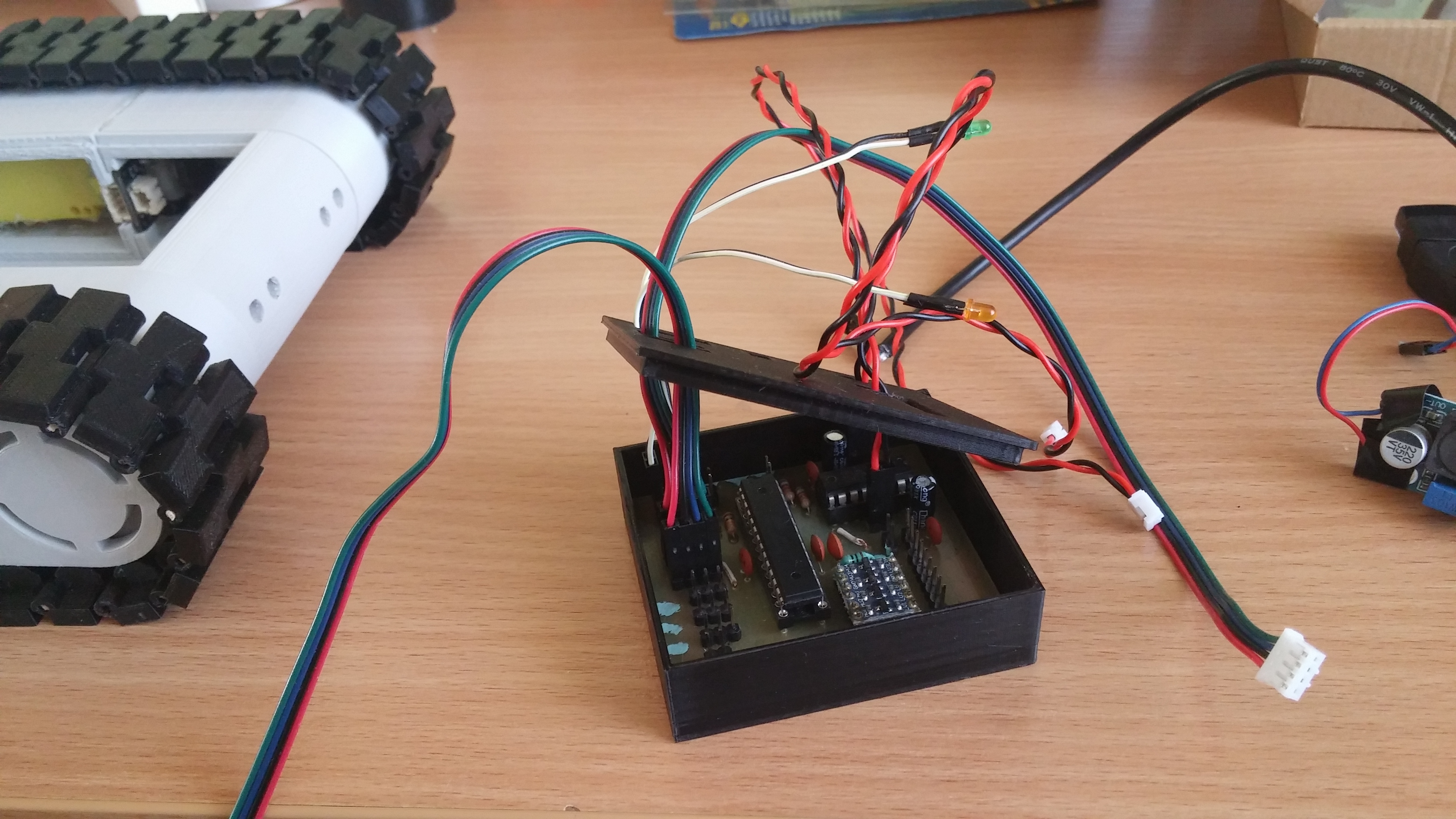
Konstrukcja czołgu została wykonana na drukarce 3D, a jej projekt zaczerpnąłem z https://www.thingiverse.com/thing:652851
Robotem steruje się poprzez przeglądarkę. W tym celu użyłem skryptu z https://hackaday.io/project/25092-zerobot-raspberry-pi-zero-fpv-robot/log/97988-the-new-zerobot-pro ,który odpowiednio przerobiłem do swoich potrzeb ( zamiana sterowania na takie wykorzystujące SPI).