Human following robot
·In this tutorial I describe one way to make robot detect and follow people - it won’t make a great spy but could be useful to carry luggage or groceries. Whole system was implemented on Husarion’s ROSbot 2 with ESP32 as a remote. To find people I used scans from LiDAR (RPLidar A2) with my leg detector, which is simple but turned out to be fast and quite reliable.
Setup
ESP32 Remote
Environment
You will need to follow tutorial about setting up rosserial connection over Internet with ESP32. On ROSbot prepare Husarnet connection and Rosserial for Husarnet. I recommend to set up Arduino IDE on your computer (remember to also get Rosserial for Husarnet).
Code
Create new sketch in Arduino IDE and copy code:
ESP Remote Code
Then get your Husarnet join code and customize code as described in ESP32 Husarnet Tutorial
Wiring
Wire your ESP32 accordingly to schematics:
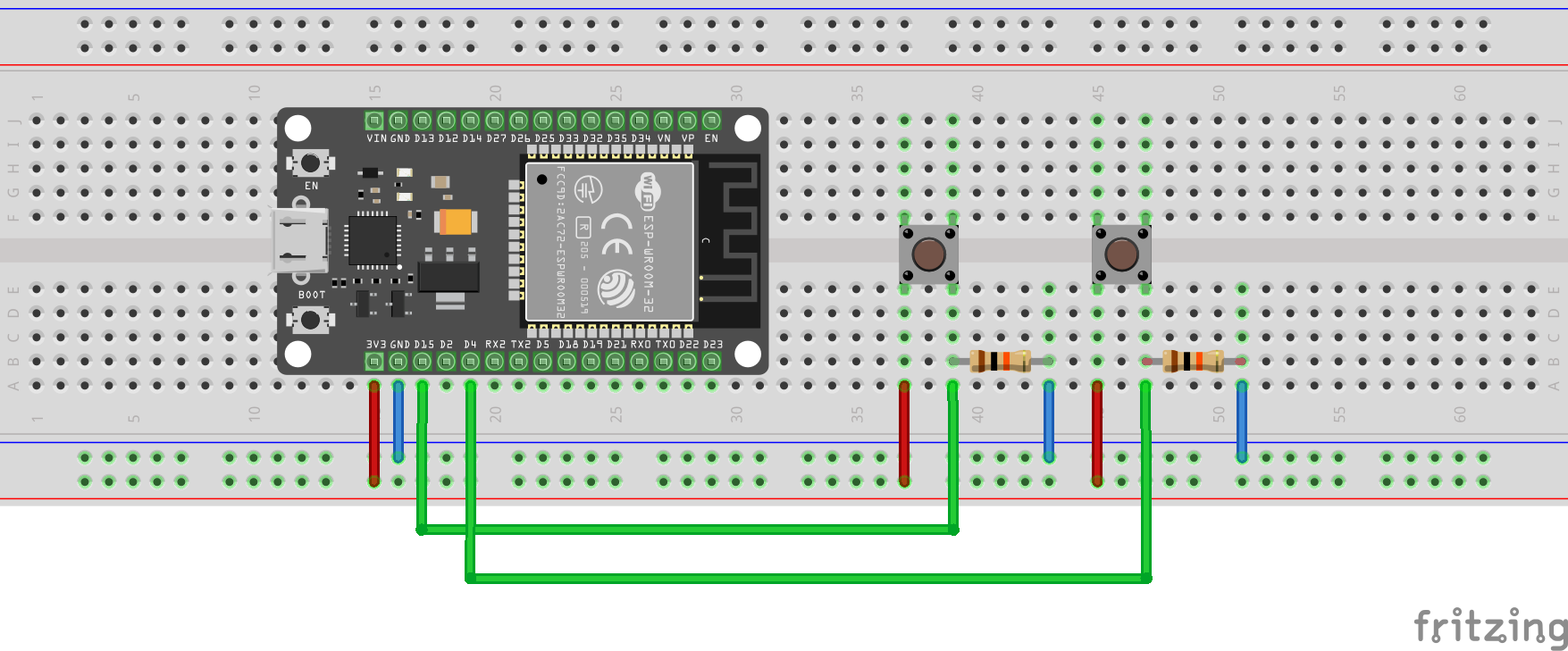
As a source of power you can use a Powerbank connected to the ESP.
ROSbot
This project is meant to run on CORE2 with Mbed firmware. So be sure that you updated your firmware as described in ROSbot quick start. On ROSbot you will need to install following dependencies:
- scikit-learn python library (for clusterization)
sudo apt-get install python-scikits-learn -
pykalman
Follow installation tutorial on pykalman page - rosbot_description package (for URDF visualization model and bridge node)
Go to your ROS workspace and clone repository:cd ~/ros_workspace/src git clone https://github.com/husarion/rosbot_description.gitInstall dependencies:
cd ~/ros_workspace rosdep install --from-paths src --ignore-src -r -y - rosbot_ekf
Install dependency:sudo apt-get install ros-kinetic-robot-localizationGet package:
git clone https://github.com/byq77/rosbot_ekf.git
Then go back to src folder in your workspace:
cd ~/ros_workspace/src
Download code:
git clone https://github.com/macstepien/rosbot_follower.git
And finally build your workspace:
cd ~/ros_workspace
catkin_make
Usage
There are two options available:
- followerSlow - better if you have little space and walk slowly.
To run it you only need to copy this commande into new terminal window:roslaunch rosbot_follower followerSlow.launch - followerKalman - this one should be able to follow you with normal walking, but it also needs some space to gain speed.
Roslaunch command:roslaunch rosbot_follower followerKalman.launch
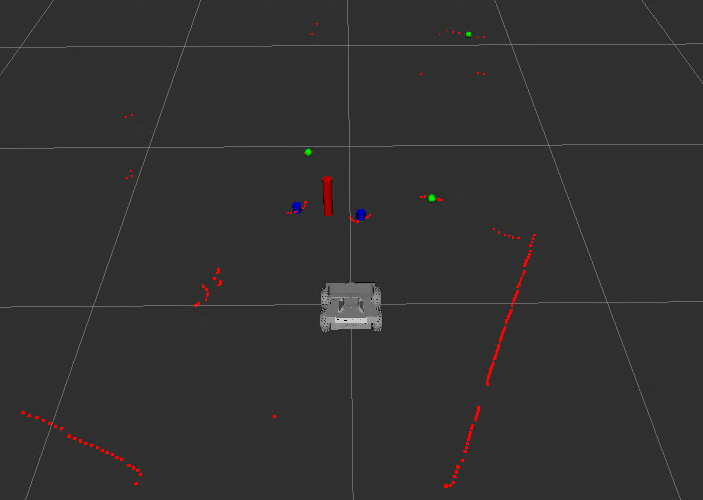
After whole system is up and running stand in front of ROSbot, but not too far away. When you are detected blue LED on ESP should turn on. Then you can press first button (the one closer to ESP on schematics) and if you start walking robot should follow you. When LED turns off it means that algorithm lost detection of you and need to recalibrate (stand closer to robot and wait until blue LED is back on). If robot had false detection you can calibrate again by pressing second button. On RViz you can see visualization: scan from LiDAR, robot model and detections. Green spheres are all potential legs, blue cylinders are detected legs and red tall cylinder is human position. In version with Kalman filter we also publish circle around human, which shows how much estimated position differs from measurement.
Troubleshooting
- LED doesn’t turn on - check RViz if you can see detected human (red cylinder). If there is a detection then press Dead Man’s Button and try to walk.
- ROSbot doesn’t respond - you should check your connection to ESP32. You can do so by echoing button topic:
rostopic echo /esp_remote/startIf nothing can be seen, try restarting your ESP by turning it off and on again.
Algorithm walkthrough
First we will go through slower version, as it is simpler. Main part of this code is scan callback where all the magic happens - data from LiDAR is analyzed and people are detected. Whole process consists of 5 steps:
- Clusterization
- Leg detection
- Human detection
- Marker publishing
- Control
1. Clusterization
def scanCallback(self, scan):
clusterList = self.findClusters(scan)
...
First we find clusters in our scan using Euclidean Clusterization Algorithm:
def findClusters(self, scan):
pointsList = np.zeros((0, 2))
i = 0
for r in scan.ranges:
if r > self.minRange and r < self.maxRange:
alfa = scan.angle_min + i * scan.angle_increment
x = r * math.cos(alfa)
y = r * math.sin(alfa)
if (alfa > -math.pi and alfa < -self.maxAngle) or \
(alfa > self.maxAngle and alfa < math.pi):
pointsList = np.append(pointsList, [[x, y]], axis=0)
elif r < self.minRange:
rospy.logerr("Obstacle detected")
return [np.zeros((1, 2))]
i += 1
db = DBSCAN(eps=self.clusterizationMaxDistanceParam,
min_samples=self.clusterizationMinSamplesParam).fit(pointsList)
core_samples_mask = np.zeros_like(db.labels_, dtype=bool)
core_samples_mask[db.core_sample_indices_] = True
labels = db.labels_
n_clusters_ = len(set(labels)) - (1 if -1 in labels else 0)
unique_labels = set(labels)
clusterList = []
for k in unique_labels:
class_member_mask = (labels == k)
xy = pointsList[class_member_mask & core_samples_mask]
if xy.any():
clusterList.append(xy)
return clusterList
Here we have few parameters that you can customize:
- minRange - used to filter ranges from lidar points, if anything gets closer than that, then ROSbot treats it as obstacle and stops
- maxRange - data from lidar further than that value are dismissed
- maxAngle - readings have to be in front of ROSbot in ranges (maxAngle, Pi) u (-Pi, -maxAngle)
- clusterizationMaxDistanceParam - maximum distance between points to add new point to cluster
- clusterizationMinSamplesParam - minimum number of points in cluster
More information about DBSCAN clusterization
Back to scanCallback:
def scanCallback(self, scan):
...
if len(clusterList) == 0:
rospy.logwarn("No clusters detected")
if rospy.get_time() - self.lastDetectionTime < self.detectionTimeout:
humanPosition = self.lastHumanPosition
self.controlRosbot(humanPosition)
else:
led = Bool()
led.data = False
self.ledPub.publish(led)
self.positionCalibration = True
rosbotControl = Twist()
self.speedPub.publish(rosbotControl)
return
elif (clusterList[0][0, 0] == 0) and (clusterList[0][0, 1] == 0):
led = Bool()
led.data = False
self.ledPub.publish(led)
self.positionCalibration = True
rosbotControl = Twist()
self.speedPub.publish(rosbotControl)
return
...
In here we check results of clusterization. If we didn’t detect anything, we continue movement in last seen human position. That is until our last seen position is too old - then we need to stop and assume we lost track of our human, which we signal through LED.
We pass special value when obstacle is detected - in first cluster first point is set to (0,0). In this case robot needs to stop immediately, as obstacle is too close.
- detectionTimeout - how much time (in seconds) we can trust last seen position and follow it
2. Leg detection
Next step is leg detection:
def scanCallback(self, scan):
...
sortedClusters = self.detectLegs(clusterList)
...
def detectLegs(self, clusterList):
i = 0
sortedClusters = []
for cluster in clusterList:
xMax = np.max(cluster[:, 0])
xMin = np.min(cluster[:, 0])
yMax = np.max(cluster[:, 1])
yMin = np.min(cluster[:, 1])
xDistance = xMax - xMin
yDistance = yMax - yMin
proportion = max(xDistance,yDistance)/min(xDistance, yDistance)
area = xDistance*yDistance
if not (max(xDistance,yDistance)-self.legWidth) < self.dLegWidth:
continue
xMean = (xMax+xMin)/2
yMean = (yMax+yMin)/2
cone = Point()
cone.x = xMean
cone.y = yMean
cone.z = 0
sortedClusters.append(cone)
sortedClusters.sort(key=lambda x: math.sqrt(x.x**2 + x.y**2))
return sortedClusters
In this section we go through each cluster and calculate its bounding rectangle. Then we filter our data with following rule: longer side of rectangle can have maximal length of legWidth + dLegWidth (meaning that we assume leg width of legWidth with upper toleration dLegWidth). I encourage you to experiment with it and maybe try other conditions e.g. area and sides proportions. If cluster passes we find its centroid and save it for further calculations. As last thing we sort our potential legs by distance from ROSbot.
- legWidth - width of the leg
- dLegWidth - toleration of leg width
def scanCallback(self, scan):
...
if len(sortedClusters) == 0:
rospy.logwarn("No legs detected")
if rospy.get_time() - self.lastDetectionTime < self.detectionTimeout:
humanPosition = self.lastHumanPosition
self.controlRosbot(humanPosition)
else:
led = Bool()
led.data = False
self.ledPub.publish(led)
self.positionCalibration = True
rosbotControl = Twist()
self.speedPub.publish(rosbotControl)
return
...
Similar to previous step we check results of leg detection. No legs found - we allow ROSbot to move for some time. This step is necessary to smooth out movement - sometimes in only one frame we don’t detect any legs, which can cause robot to stop and go.
3. Human detection
We estimate human position through analysis of legs detections:
def scanCallback(self, scan):
...
(firstLeg, secondLeg, humanPosition, firstLegDetected, twoLegsDetected) = self.detectHuman(sortedClusters)
...
def detectHuman(self, sortedClusters):
firstLeg = sortedClusters[0]
firstLegDetected = False
twoLegsDetected = False
secondLeg = Point()
humanPosition = Point()
humanPositionTemp = Point()
if len(sortedClusters) > 2:
sortedClusters.sort(key=lambda x: math.sqrt((x.x-firstLeg.x)**2 + (x.y-firstLeg.y)**2))
secondLeg = sortedClusters[1]
legDistance = math.sqrt((firstLeg.x - secondLeg.x)**2 + (firstLeg.y - secondLeg.y)**2)
if legDistance < self.legDistanceThreshold:
humanPositionTemp.x = (firstLeg.x+secondLeg.x)/2
humanPositionTemp.y = (firstLeg.y+secondLeg.y)/2
humanPositionTemp.z = 0
twoLegsDetected = True
else:
humanPositionTemp = firstLeg
else:
humanPositionTemp = firstLeg
if self.positionCalibration:
r = math.sqrt( humanPositionTemp.x ** 2 + humanPositionTemp.y ** 2)
if r < self.calibrationDistance and twoLegsDetected:
self.lastHumanPosition = humanPositionTemp
humanPosition = humanPositionTemp
firstLegDetected = True
self.lastDetectionTime = rospy.get_time()
self.positionCalibration = False
led = Bool()
led.data = True
self.ledPub.publish(led)
else:
distanceChange = math.sqrt((self.lastHumanPosition.x - humanPositionTemp.x)**2 \
+ (self.lastHumanPosition.y - humanPositionTemp.y)**2)
if distanceChange < self.humanPositionChangeThreshold:
humanPosition = humanPositionTemp
firstLegDetected = True
self.lastHumanPosition = humanPosition
self.lastDetectionTime = rospy.get_time()
else:
if rospy.get_time() - self.lastDetectionTime < self.detectionTimeout:
humanPosition = self.lastHumanPosition
else:
led = Bool()
led.data = False
self.ledPub.publish(led)
self.positionCalibration = True
return (firstLeg, secondLeg, humanPosition, firstLegDetected, twoLegsDetected)
We assume our first detected leg is one closest to ROSbot. Second leg (if any available) is one closest to first leg (if it’s close enough). With two legs detected we calculate possible human position as mean between legs, otherwise we use first leg as possible human position.
When human position is not calibrated, then two legs have to be visible in range closer than given threshold. Provided that our position is already calibrated, we can check if our detected human position is viable. We calculate difference in positions between new and old detection, too big value means that it’s probably false detection. In this case we check if we can use older position, otherwise we lost track of human position.
- legDistanceThreshold - maximum distance from first leg to second leg, if second leg distance is more than that, we use only first leg detection
- calibrationDistance - maximum distance from human to ROSbot to initialize position
- humanPositionChangeThreshold - maximum distance between last detected human position and recent human position
- detectionTimeout - how much time we can use old detection as human position, if we exceed this time we consider that we lost our human detection
4. Marker publishing
Visualization of our detections
def scanCallback(self, scan):
...
self.publishMarkers(firstLeg, secondLeg, humanPosition, firstLegDetected, twoLegsDetected, sortedClusters)
...
def publishMarkers(self, firstLeg, secondLeg, humanPosition, firstLegDetected, twoLegsDetected, sortedClusters):
legMarker = Marker()
legMarker.header.frame_id = "laser"
legMarker.ns = "person"
legMarker.header.stamp = rospy.Time()
legMarker.type = Marker.CYLINDER
legMarker.action = Marker.ADD
legMarker.pose.orientation.x = 0.0
legMarker.pose.orientation.y = 0.0
legMarker.pose.orientation.z = 0.0
legMarker.pose.orientation.w = 1.0
legMarker.scale.x = 0.04
legMarker.scale.y = 0.04
legMarker.scale.z = 0.04
legMarker.color.a = 1.0
legMarker.color.r = 0.0
legMarker.color.g = 0.0
legMarker.color.b = 1.0
legMarker.lifetime = rospy.Duration(0.5)
if not self.positionCalibration:
#first leg
if firstLegDetected:
legMarker.id = 1
legMarker.pose.position = firstLeg
legMarker.pose.position.z = 0.02
self.legPub.publish(legMarker)
#second leg
if twoLegsDetected:
legMarker.id = 2
legMarker.pose.position = secondLeg
self.legPub.publish(legMarker)
#human position
legMarker.id = 3
legMarker.scale.z = 0.2
legMarker.pose.position = humanPosition
legMarker.pose.position.z = 0.1
legMarker.color.r = 1.0
legMarker.color.b = 0.0
self.legPub.publish(legMarker)
legMarker = Marker()
legMarker.ns = "legs"
legMarker.header.frame_id = "laser"
legMarker.header.stamp = rospy.Time()
legMarker.type = Marker.SPHERE
legMarker.action = Marker.ADD
legMarker.pose.orientation.x = 0.0
legMarker.pose.orientation.y = 0.0
legMarker.pose.orientation.z = 0.0
legMarker.pose.orientation.w = 1.0
legMarker.scale.x = 0.04
legMarker.scale.y = 0.04
legMarker.scale.z = 0.04
legMarker.color.a = 1.0
legMarker.color.r = 0.0
legMarker.color.g = 1.0
legMarker.color.b = 0.0
legMarker.lifetime = rospy.Duration(0.2)
i = 1
for x in sortedClusters:
legMarker.id = i
i += 1
legMarker.pose.position.x = x.x
legMarker.pose.position.y = x.y
self.legPub.publish(legMarker)
Pretty straightforward: we publish markers with potential legs (green spheres), detected legs (if any found, blue cylinders) and human (red cylinder).
5. Control
And final step is movement control:
def scanCallback(self, scan):
...
self.controlRosbot(humanPosition)
def controlRosbot(self, humanPosition):
r = math.sqrt( humanPosition.x ** 2 + humanPosition.y ** 2)
a = math.atan2(humanPosition.y, -humanPosition.x)
if r > self.minHumanDistance:
xSpeed = -r * self.speedPGain
else:
xSpeed = 0
if abs(a) > self.minHumanAngle:
zAngularSpeed = a * self.angularSpeedPGain
else:
zAngularSpeed = 0
rosbotControl = Twist()
if rospy.get_time() - self.buttonTime < self.buttonTimeout and \
self.buttonState == True and not self.positionCalibration:
rosbotControl.linear.x = xSpeed
rosbotControl.angular.z = zAngularSpeed
self.speedPub.publish(rosbotControl)
else:
self.speedPub.publish(rosbotControl)
Firstly we convert our cartesian coordinates to polar ones. Then we calculate angular and linear speed for ROSbot with proportional controller. We publish it if we receive message from remote that allow robot to move.
- minHumanDistance - if human distance is more than that robot will start following
- minHumanAngle - if human angle is more than that robot will start following
- speedPGain - proportional gain for linear ROSbot speed (increase if you want your robot to go faster)
- angularSpeedPGain - proportional gain for angular ROSbot speed (increase if you want your robot to turn faster)
- buttonTimeout (seconds) - if we don’t receive new Dead Man’s Button message for that time ROSbot isn’t allowed to move
FollowerKalman
This version is improved slow follower - basically only additions are scoring system and Kalman filter. Also I changed some parameters to make it more suitable for higher speeds.
In order to implement Kalman filter I created Person class where human position is stored and updated. For Kalman Filter part I used code from leg_tracker. All the parameters for filter were well tuned, I only changed std_obs value.
- std_obs - increasing this value means you don’t trust your measurements and as the effect your data is much more filtered. Be careful with changing it too much, because it causes your estimated human position to be slower to sudden changes - if you stop, filter won’t trust as much your readings and as a result it will predict you will still move with some velocity. Consequently robot will continue moving forward and it will take some time to adjust to reality. On the other hand if you decrease it too much human position will fluctuate with uncertainties in leg detections.
Next big change is that I added scoring system which uses all parameters: proportion, area, length and distance. It combines it with appropriate weights.
proportion = max(xDistance,yDistance)/min(xDistance, yDistance)
area = xDistance*yDistance
widthDifference = (max(xDistance,yDistance)-self.legWidth) - self.dLegWidth
distanceFromRobot = math.sqrt(xMean**2 + yMean**2)
score = 0
score += distanceFromRobot * self.distanceWeight
score += abs(proportion - self.destProportion) * self.proportionWeight
score += abs(area - self.destArea) * self.areaWeight
if widthDifference > 0:
score += (abs(widthDifference) * self.widthDifferenceWeight)**2
if score < self.maxScore:
sortedClustersDetails.append([xMean, yMean, distanceFromRobot, proportion, area, widthDifference, score])
Parameters:
- destProportion - our desired proportion, I set it based on readings I got
- destArea - same as above but with area
- distanceWeight - weight we give to distance from robot
- proportionWeight - weight we set to distance between measured proportion and desired
- areaWeight - don’t set this weight too high, as it is not as reliable
- widthDifferenceWeight - we set it really high, because when reading is too long, then it’s probably not a leg
- maxScore - above that score we are certain that detection isn’t a leg
Parameters with updated values:
- minRange (increased) - robot has to detect obstacles earlier
- speedPGain (increased) - increase in proportional gain to obtain higher speed
- angularSpeedPGain (increased) - same as above
- minHumanDistance (decreased) - robot will start following earlier and be able to keep up with human
- humanPositionChangeThreshold (increased) - person walks faster so position can change more
- detectionTimeout (decreased) - higher speeds, so we decrease timeouts
- buttonTimeout (decreased) - same as above
Lastly I added restrictions on obstacle detect - we only detect obstacle approximately in area where we can drive. Increasing minRange can cause ROSbot to be unable to move in narrow spaces.
if (alfa > -math.pi and alfa < -self.maxAngle) or \
(alfa > self.maxAngle and alfa < math.pi):
Summary
In this tutorial you learned how to set up and run human following using ROSbot with ESP remote. After main algorithm walkthrough you should be also able to modify it to suit your robot.