Tank
·Remotely controlled inspection robot based on Raspberry Pi Zero.

The robot can be teleoperated using a web browser, it works quite well in rough terrain:
Construction started with PCB:
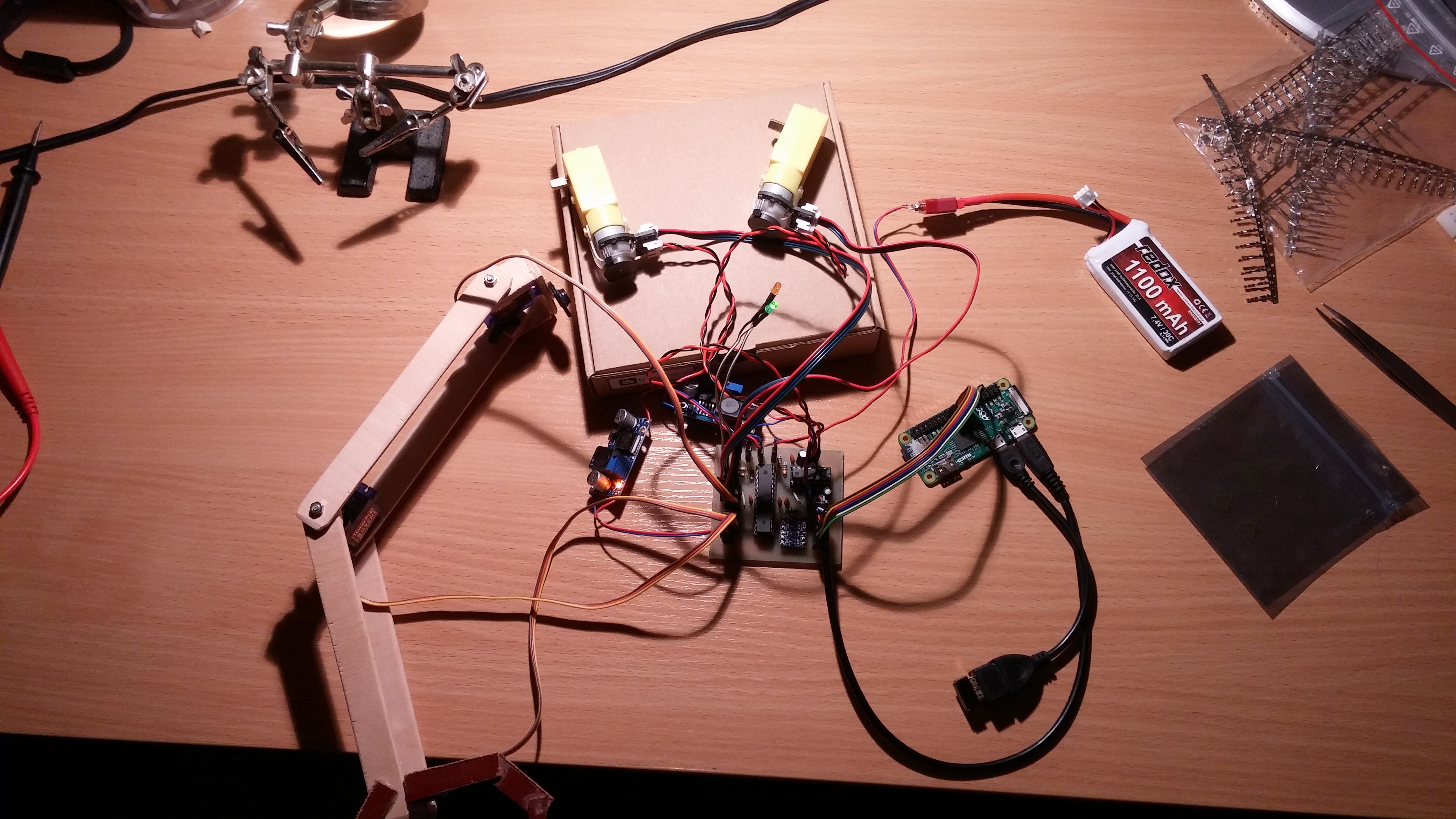
The PCB was supposed to control the following components:
- 2 motors with encoders
- 3 servos
- SPI communication with Raspberry
- battery voltage measurements
- 2 LEDs (indicating low battery voltage and “power on”)

As a power source I used a LiPol battery that was connected to 2 voltage converters: one for the microcontroller and one for servos.
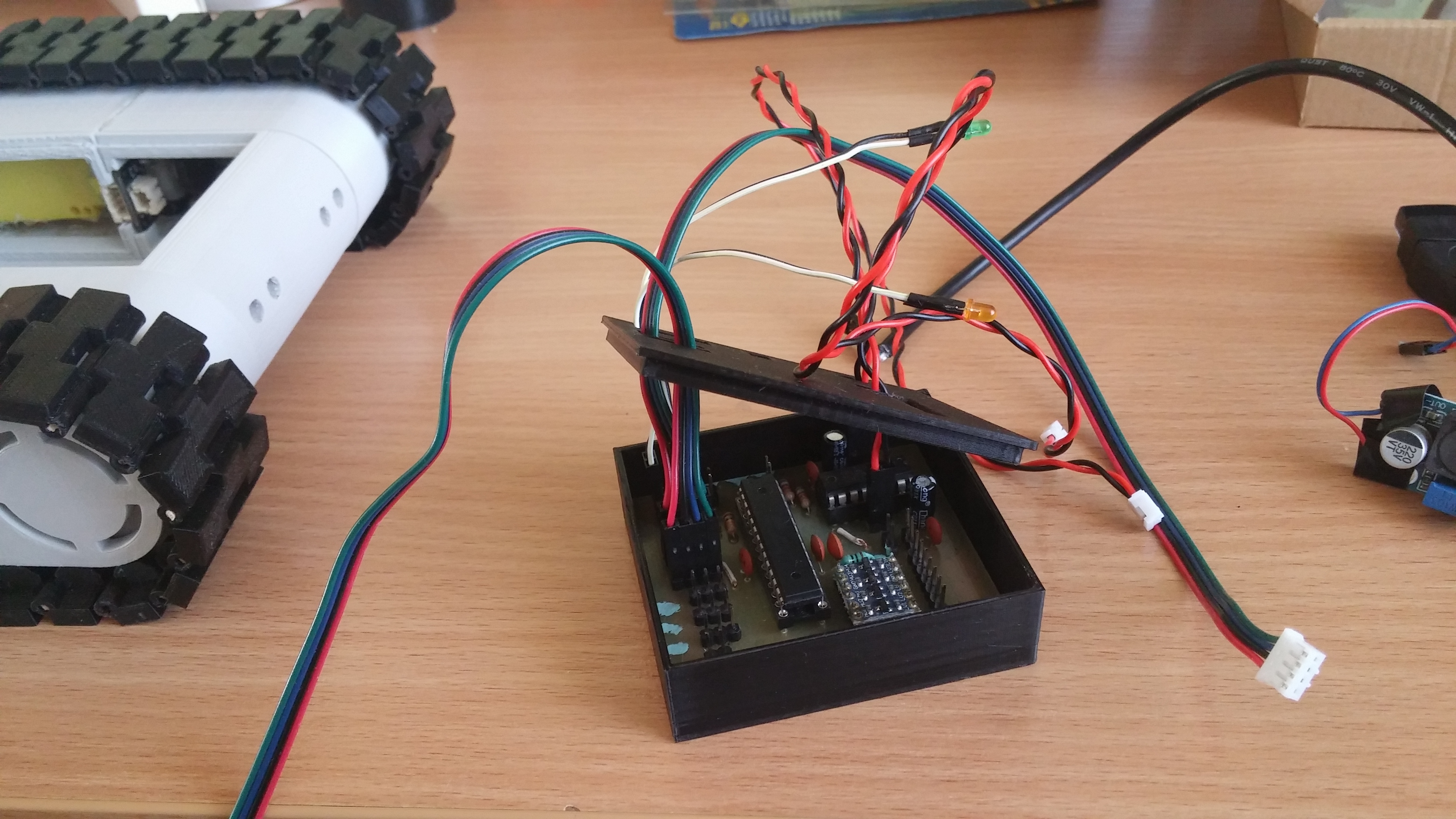
Parts of the construction were 3D printed using https://www.thingiverse.com/thing:652851
The robot was controlled through a web browser, I used https://hackaday.io/project/25092-zerobot-raspberry-pi-zero-fpv-robot/log/97988-the-new-zerobot-pro, modified to work with my SPI communication.